還記得科幻電影里那個能幫你打理一切家務的機器人伙伴嗎?它或許不再是遙遠的夢想了。由OpenAI、英偉達和三星等科技巨頭支持的機器人公司1X宣布,其首款面向消費者的人形機器人Neo正式開放預訂。這標志著全球第一款真正能走入家庭、處理雜務的通用型人形機器人,即將從實驗室走進我們的客廳。
從展示到實干:機器人技術的分水嶺
過去的機器人演示,總離不開跳芭蕾、翻跟頭等程式化表演。但Neo的使命截然不同:它生來就是干活的。
想象一下,只需喊一聲“Neo,幫我疊衣服”,一個身高1米68、穿著高領衫和運動鞋的機器人便會應聲而來,用其靈巧的雙臂熟練地折疊好衣物。這并非概念視頻,而是它的核心功能。早在今年三月,Neo就已經展現了其實際能力——它親自為英偉達CEO黃仁勛挑選并遞上了一件皮夾克,引發了全球科技圈的轟動。
設計哲學:友善、靈巧、強大
在設計上它全身覆蓋著柔軟的聚合物外殼,身高1.68米,體重僅30公斤,旨在消除傳統機器人帶來的“金屬終結者”般的冰冷和恐懼感。看起來“只是一臺能做家務、會聊天、還挺有性格的機器人”。
然而,在溫和的外表下,是頂尖的工程實力。擁有22個關節驅動的手臂,靈活度接近人類,能夠提起約20公斤的物體。顯示出Neo在輕量化和核心家務功能上的專注優化。
下面我們來分析下Neo的模塊構成(注:下列模塊構成僅為猜測分析)
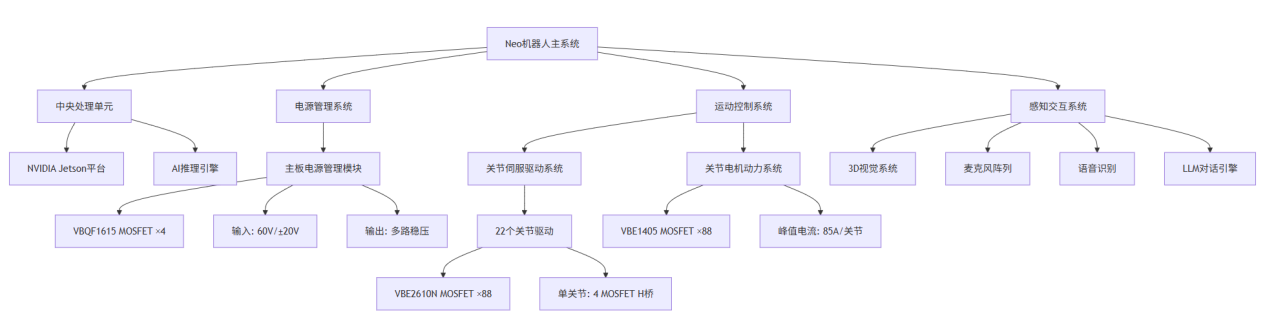
機器人的系統級拓撲和工作流程分析
技術核心:三大電路模塊構成的“神經”與“肌肉”
Neo的卓越能力,源于其內部高度集成的三大核心電路模塊,它們共同構成了機器人的“神經系統”和“肌肉系統”。
大腦與感知:NVIDIA Jetson平臺
Neo體內搭載了強大的“大腦”——NVIDIA Jetson邊緣計算平臺,配合3D視覺攝像頭和麥克風陣列,使其能夠精準識別語音、理解物體、甚至進行智能對話。
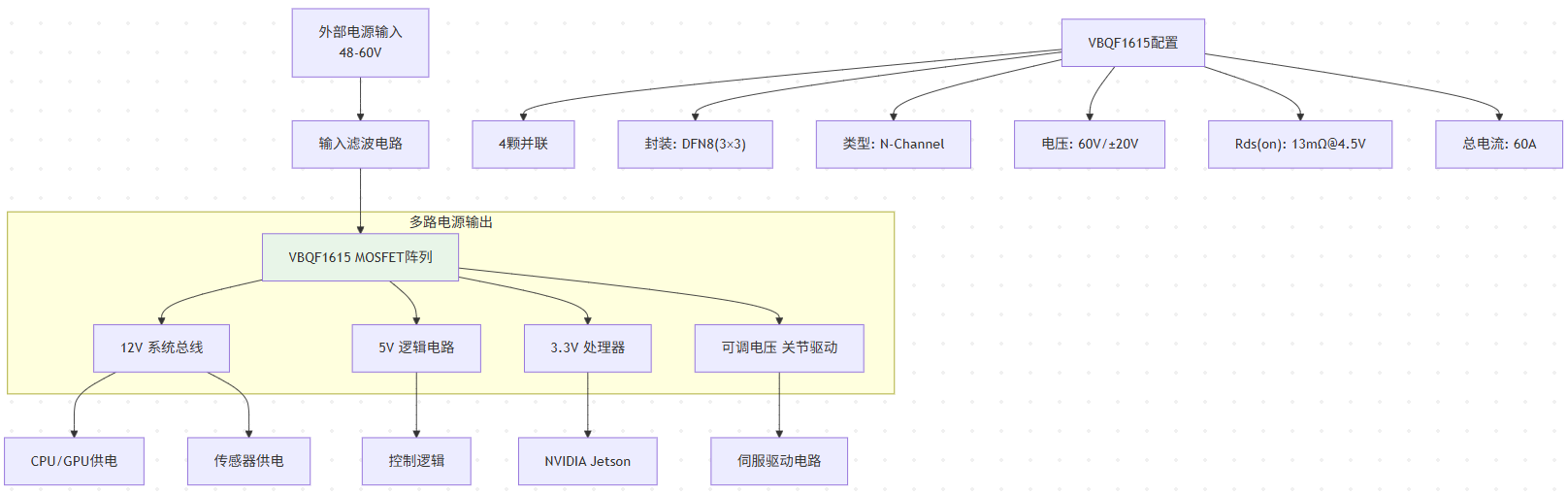
主板電源管理模塊拓撲圖
拓撲說明:
并聯架構:4顆VBQF1615 MOSFET并聯
多路輸出:提供系統各級所需電壓
高效轉換:低導通電阻確保高效電源管理
緊湊設計:DFN8封裝節省PCB空間
心臟與能量:主板電源管理模塊 (VBQF1615)
就像心臟為身體泵送血液,電源管理模塊為整個系統提供穩定、高效的能量。該模塊采用VBQF1615 MOSFET,其結構緊湊,導通電阻極低,確保了在復雜任務中持續穩定的電力供應。
神經與肌肉:關節驅動系統
這是Neo能夠靈活運動的關鍵。該系統分為兩部分:
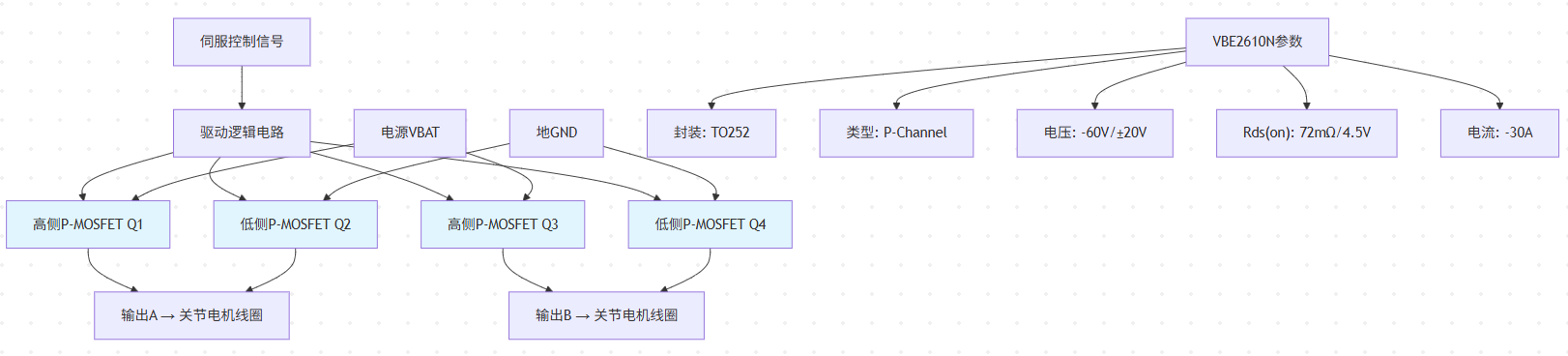
關節伺服驅動模塊拓撲圖
拓撲說明:
H橋架構:4個P-MOSFET構成標準H橋驅動
控制模式:精密PWM控制,實現位置伺服
單關節需求:推薦用TO252、P-MOSFET如VBE2610N:-60V -30A低功率應用,成本顯著,穩定
精密控制(伺服驅動 - VBE2610N):負責每個關節的精確角度和位置控制,如同控制我們手臂肌肉的神經。實現了細膩如疊衣服的動作。
力量輸出(電機驅動 - VBE1405):提供關節運動所需的核心動力,如同肌肉本身。可推薦使用VBE1405 MOSFET,能承受高達85A的電流,讓Neo擁有提起重物的強大力量。
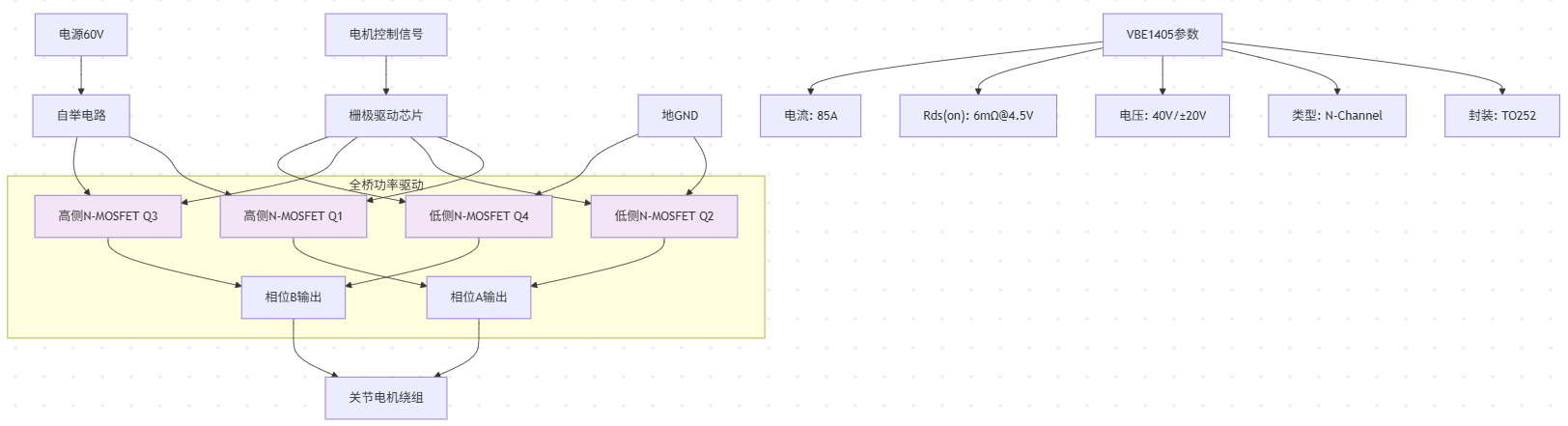
關節電機驅動模塊拓撲圖
拓撲說明:
全橋驅動:4個N-MOSFET構成大電流全橋
動力輸出:提供關節運動的核心扭矩
單關節需求:推薦MOSFET-VBE1405(TO252;Single-N;40V;85A;)方案成熟,適合大部分基礎應用場景
峰值功率:每關節最大3.74kW
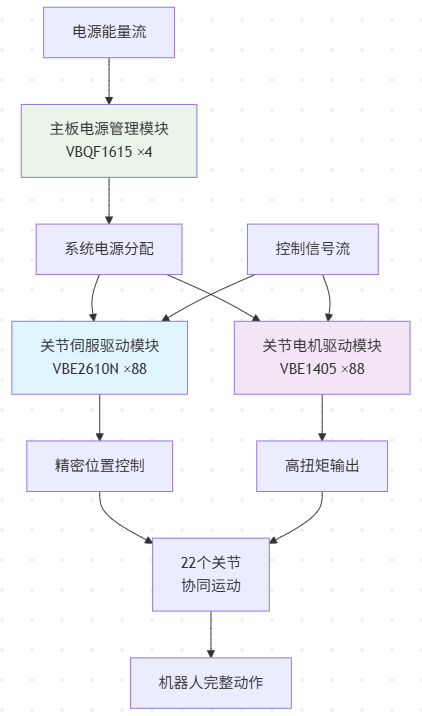
三模塊系統集成拓撲
系統集成說明:
模塊化設計:三大模塊各司其職,協同工作
信號隔離:控制信號與功率路徑分離
冗余設計:多MOSFET并聯提供系統可靠性
熱管理:分布式散熱設計確保長期穩定運行
這三大模塊協同工作,構成了一個從“聽到指令”到“思考規劃”再到“精準執行”的完美閉環。
不止于家務:全能的家庭伙伴
基于上述強大的硬件和AI能力,Neo被設計為一個多功能的家庭伙伴:
家務處理:折疊衣物、整理書架、收拾雜物。
日常協助:幫你取東西、在門口迎接客人、晚上巡視關燈。
智能交互:內置大型語言模型,可以像最聰明的智能音箱一樣與你自然對話,并根據廚房臺面的食材建議食譜。
情境感知:能理解對話的上下文,知道何時該插話,何時該保持安靜。
記憶與娛樂:它能記住你的偏好,管理日程,甚至其胸部和骨盆內置的三級揚聲器,能讓它成為一個移動的家庭娛樂中心。
Neo的誕生,不僅僅是一款新產品的發布,它更代表著一個新時代的開啟。
|
商品編號 |
廠家型號 |
規格 |
品牌名稱 |
類目 |
|
C7494498 |
DFN3x3-8 |
VBsemi(微碧半導體) |
場效應管(MOSFET) |
|
|
C480956 |
TO-252 |
VBsemi(微碧半導體) |
場效應管(MOSFET) |
|
|
C416254 |
TO-252 |
VBsemi(微碧半導體) |
場效應管(MOSFET) |